國內(nèi)某農(nóng)墾局為解決農(nóng)機裝備未集中聯(lián)網(wǎng)監(jiān)管、農(nóng)機作業(yè)較多依賴人力、作業(yè)效率低等問題,創(chuàng)新開展了5G+AI無人農(nóng)機作業(yè)項目探索,構(gòu)建了5G云網(wǎng)融合能力平臺,提供了大帶寬低時延網(wǎng)絡(luò)以及邊緣計算能力。
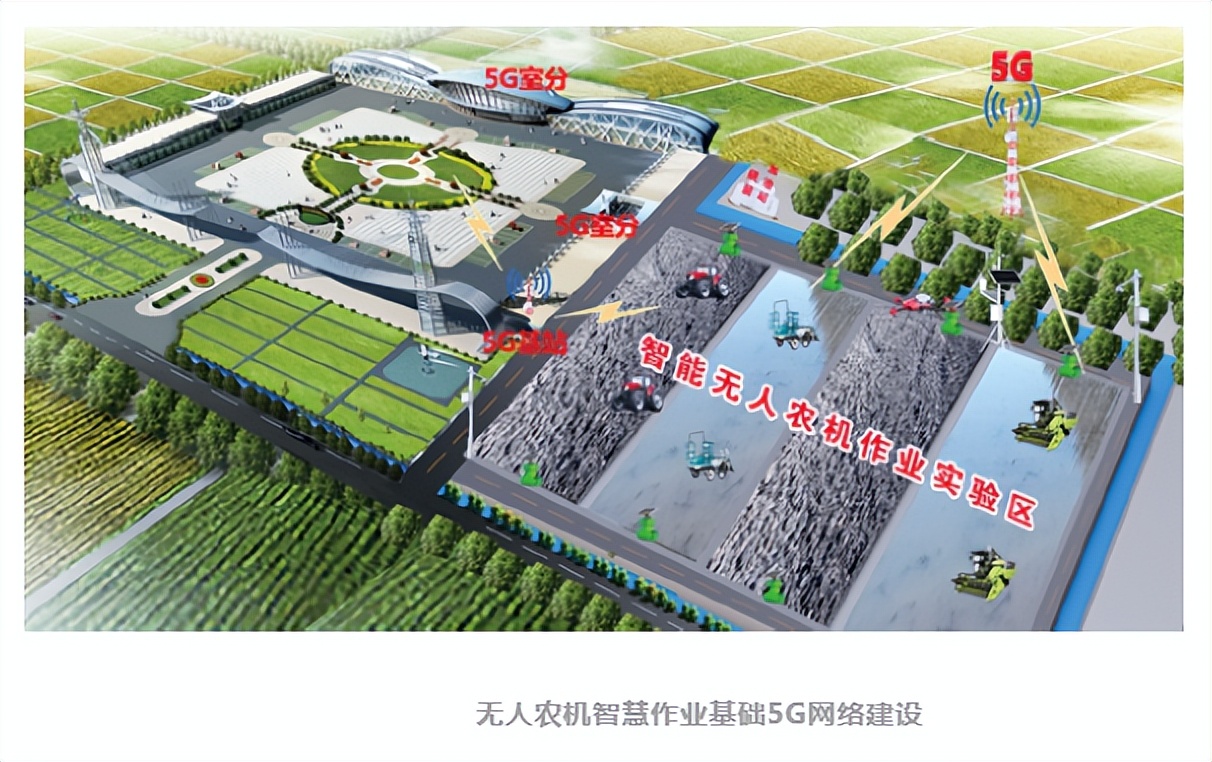
5G農(nóng)機無人作業(yè)系統(tǒng)部署在5G云網(wǎng)融合平臺之上,并與智能農(nóng)機裝備對接,實現(xiàn)了農(nóng)機從機庫、機耕道到作業(yè)地塊的全流程無人作業(yè),覆蓋了水稻種植耕、種、管、收全部生產(chǎn)環(huán)節(jié)。
在機庫和道路上,首先進行位置地圖建模,基于RTK差分GNSS定位技術(shù)、IMU數(shù)據(jù)與UWB精準定位技術(shù)的應(yīng)用設(shè)備部署,實現(xiàn)室內(nèi)外厘米級定位精度;
其次結(jié)合部署在邊緣云的核心控制系統(tǒng)以及安裝在農(nóng)機上的視覺、雷達終端,智能感知周圍環(huán)境;
最后采用AI深度學(xué)習(xí)算法,完成農(nóng)機前進和倒車時的標志線識別和障礙物檢測,從而實現(xiàn)農(nóng)機無人駕駛、泊車、障礙物識別和自動避障。
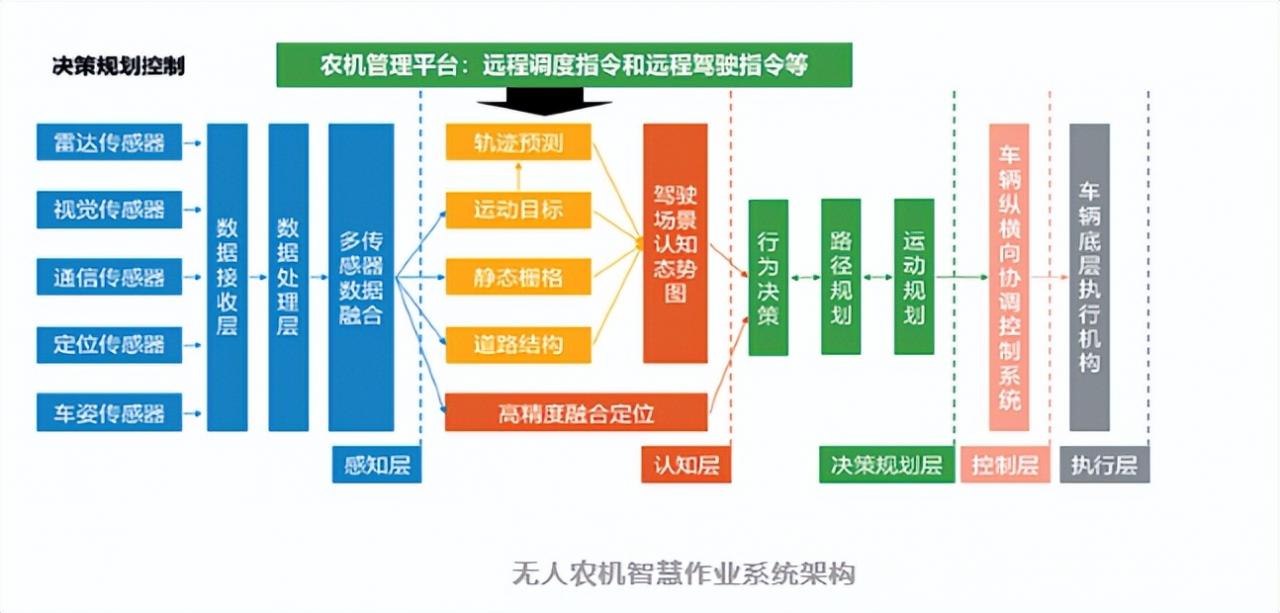
在作業(yè)地塊內(nèi),基于提前測繪的高精地圖、RTK差分GNSS室外高精度定位,結(jié)合路徑規(guī)劃及路徑跟蹤控制技術(shù),實現(xiàn)農(nóng)機路徑跟蹤與運動控制。在核心控制系統(tǒng)的調(diào)度下,農(nóng)機可實現(xiàn)全流程的無人作業(yè)。
該系統(tǒng)已在80余畝的試驗田部署實施,充分利用了5G“云—網(wǎng)—邊—端”融合優(yōu)勢,實現(xiàn)了地塊、農(nóng)事、農(nóng)機信息一體化資源管理。
平均每臺農(nóng)機降低1人/ 次日作業(yè)人力成本,實現(xiàn)了降本增效;通過夜間無人作業(yè),平均延長1倍農(nóng)機作業(yè)時間,全力為農(nóng)忙保駕護航。
 官方微信
官方微信